Robot-1
Design
|
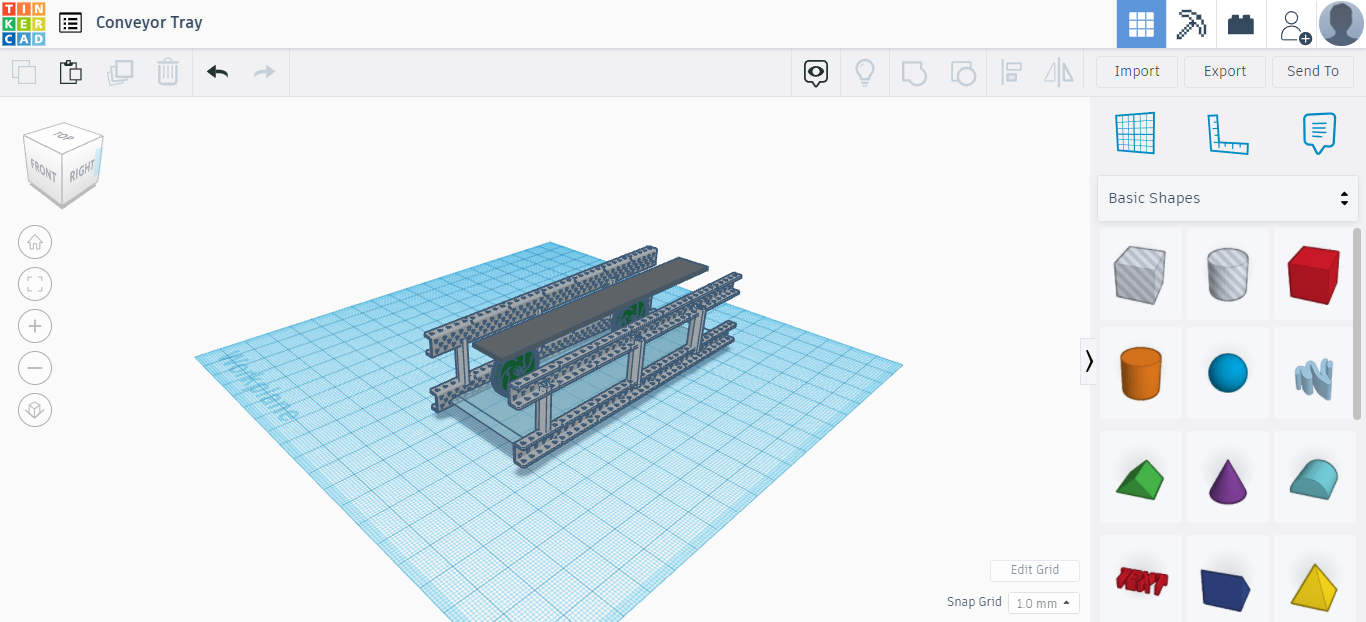
As we discussed int he previuos upatede, We are currently bipldign andtesting our arm and coveter tray for our robot. We have done so by testing difefetent deings and even creatimng these diesngs on Tinkercad. As you can see on the left, This device it our conveyer tray will an carry rings and drop them into the rings. We have also develeoped full robot 3d models to act as guide and help us innovate better ideas.
|
|
|
|
Current Progress
|
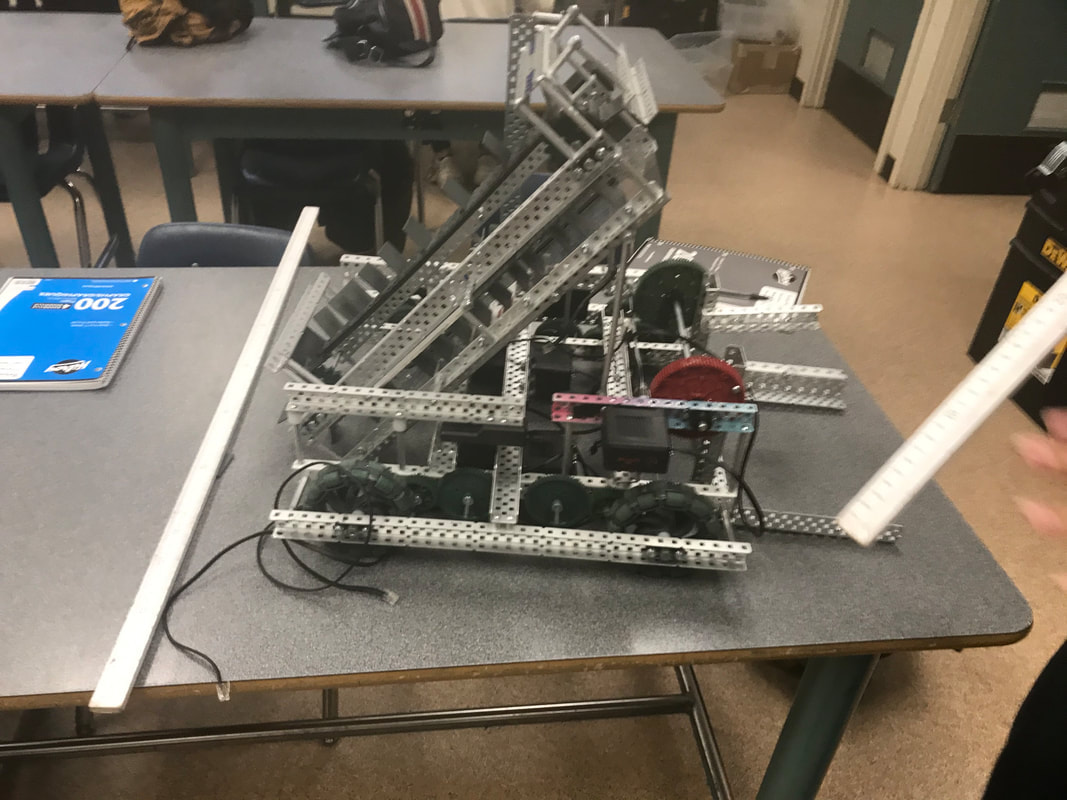
So we are done building our Robot-1's arm and now We have also built our conveyor tray. After completing the arm for our primary robot, my group members and I began focusing on the robot's vertical conveyor as we believed it would be the most efficient and effective way to construct the conveyor. However, while testing our robot's arm, we discovered new issues that had never occurred before. The standard motor with an 18:1 Cartridge and 200 Rpm did not contain enough torque to pick up the goals at an adequate speed. Moreover, the C-channels connected to make the robot's arms were extremely unstable and could not support the weight of any goals. Therefore, my group members and I decided to change our original plan for the robot. Instead, we placed two large holes in our robot's C-channels supporting the gears and added a high-strength bar. We also used a high-strength motor with a 36:1 Cartridge and 100 Rpm. This gave our robot the ability to use its arm gears without any jamming or other significant issues. Nevertheless, to fix the C-channel problem, we have decided to place two bearing flats on each side of the arm in order to increase the sturdiness and strength to pick up goals.
Next StepSince We are done building the offensive components of our robot, we will now start testing, coding and focusing on autonomous. We also trying to build a defensive tool in this robot called the hooker.

|


|
Evolution of Robot-1
Robot-2
Design
|
We had some problems with our previous idea, so we have decided to put that robot aside for a while and focus on building Robot-1 so that we can take it to the competition. The design idea for the new robot is still in progress but we have decided to make a robot with a fore-bar accompanied by a tiltler arm.
|
Progress

|
Still, even though we have found a solution to our primary robot, my group members and I decided to restart our secondary robot from scratch. Initially, the robot's arm was having difficulty as the C-channel was very unsteady and could not hold the weight of the goals. When the issue was supposedly fixed, my group members and I discovered that when we would move the arm in a complete 360° motion, the gears would get jammed against each other while stopping the arms movements. Therefore, we decided to loosen the gears and chain; this led to more issues as the C-channel would get stuck against the chain. Regardless, the robot's new design will be straightforward by having two C-channels as the arms and a vertical conveyor belt. (The arm will hold the goals in place while the conveyor launches the rings.)
|
