VEX Swept Away Finals:
Our Competition Performance : Merrits & Demerrits of our robot
|
|
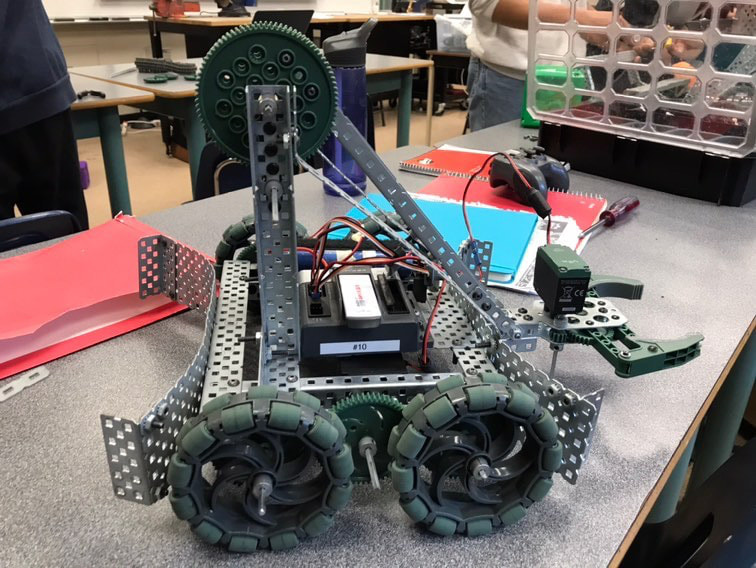
So there is bunch of stuff that can be picked up like both positve and negitive, The performance of our robot during the VEX Swept Away competition was not impressive at all and my team was highly disappointed from the performance and that was because we had put a lot of work and time into this robot. There were several reasons that we could not execute our plans. In our robot the merits were that we had put a lot of thinking and ideas in it, it idea was strong. The build of our robot was strong and there were hardly and wiggly parts in our robot. Also our robot was pretty secure. We had spent a lot of time working and modifying the parts and we thought how we could have made things better every day. Our Neutral parts were that at times the whole team was giving their best to this robot but then there were times when someone was trying hard and others were doing nothing. The negative parts were that sometimes we used to overthink about our robot and did not take risks, we kept on redoing stuff which wasted a lot of our time. We did not practice the most important part of robot which was driving since we were always innovating new stuff we could not get time to practice driving and this acme to be the negative part of the robot since in the competition we could not score that many points and lost all of our games. During the competition we were constantly driving really terrible and our average score was 2 or 3 balls in the other side but on the other hand our robot worked and did not fall apart during the competition. During this project we had a bunch of failures like motor were getting messed or gear was breaking but otherwise this project as fun.
____________________________________________________________________________ |
What we would have done if we redo this project??
|
If we were to redo this robot we would have both done or not done a bunch of work for example at times my group and me were not focusing that much on the robot and were taking it kind of easily but if we had focused we would have been done super fast and we would have time to test and we would have gotten more time to work on other stuff. also we could have even out our time and scheduled it properly like when to practice driving and when to test or build we would have been for efficient. we should have even out our work by giving equal time to all the stuff and work. We could parcticed a bit more on driving. in the terms of structure we would have kept same claw and not build a mega-claw. we would have checked the motors that if they worked or not. In the terms of coding we could have done some background research and taring of C language coding. Last But not least we could have added some extra support for the clawbot and also add 2 motors on the claw which would have made it way faster.
_____________________________________________________________________ |
