Current Progress IRL
What is Sketch-Up
|
|
Sketch-Up is a free, online 3D modeling program that runs in a web browser, known for its simplicity and ease of use. it has become a popular platform for creating models as well as an entry-level introduction to 3D Modeling in schools. But Also SketchUp is a 3D modeling computer program for a wide range of drawing applications such as architectural, interior design, landscape architecture, civil and mechanical engineering, film and video game design. I will be using Sketch-Up for School to desing my Change-Up 2020 Robot to make a type blupritn or a guide to help us in succeding to make a Robot For thr game. This would give us a idea about what to build and something we could use to plan things out.
**3D MODEL ALL THE WAY IN THE BOTTOM** |
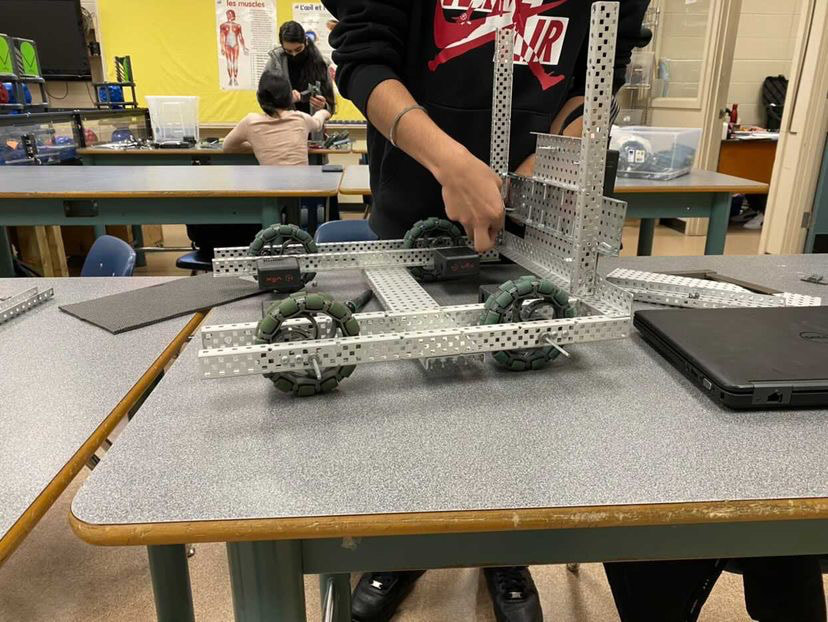
Current Progress
|
Last update about the build of the robot was given in Change Up Prototype in which we explained how we previously faced some problems with our drivebase and how we fixed and what were our plans with the robot. This is where we used a 3D Model made through Sketch-Up to explain our design/strategies to build a well functioning bot. In this Portfolio we would be giving an update on the current situation and the progress of the change up bot and how we will be moving forward with the further engineering and a demo of our 3D Model. So our drivebase is an All wheel drive setup which means each wheel is powered by a motor that is 4 motors used to drive this robot. on the rear of the base we have the main control center where you can find the brain, battery and the radio. right beneath it are the anti tip off wirch are pole like objects screwed to the both ends of the rear of the bot which decrease the chances of tipping. We are going to be using a ramp which will lead the balls to the rollers which would turn with the help of gear ratios and motors to score points. Which ther the tower section would have 3 rollers, 2 in front and 1 in the back which would have a ramp connected to which would pass the balls from the intakes to the rollers.
|
Some Inspiration
__________________________________________________
Our 3D Model
Slideshow of The 3D Model |
This is Our 3D MODEL. Making the model itself was pretty hard to manage but in the end we tried our best and got this. This basically shows our plan in the best way possible which is pretty efficient if we can execute and build bot. The purpose of this design is to be able to pick up any colored ball, and the robot will autonomously eject all opponent balls. When the robot is filled with 3-4 same alliance balls, you will go up to a goal and put the robot against the goal post. There will be an ultrasonic sensor in front of the robot so when you are lined up, the robot will immediately start replacing the entire goal within 1 second by chucking the 3 balls into the goal while simultaneously intaking the opponents balls from the bottom of the goal and ejecting them out of the robot. Because the distance isn’t that far, we can have a hood that is unsupported so it can easily flip up above the 18" limit when the match begins..So our drivebase is an All wheel drive setup which means each wheel is powered by a motor that is 4 motors used to drive this robot. on the rear of the base we have the main control center where you can find the brain, battery and the radio. right beneath it are the anti tip off wirch are pole like objects screwed to the both ends of the rear of the bot which decrease the chances of tipping. We are going to be using a ramp which will lead the balls to the rollers which would turn with the help of gear ratios and motors to score points. There the tower section would have 3 rollers, 2 in front and 1 in the back which would have a ramp connected to which would pass the balls from the intakes to the rollers.
|
