
Last Update
|
Last update about the build of the robot was given in Change Up 3D Model in which we explained how we previously faced some problems with our drivebase and how we fixed and what were our plans with the robot. This is where we used a 3D Model made through Sketch-Up to explain our design/strategies to build a well functioning bot. In this Portfolio we would be giving an update on the current situation and the progress of the change up bot and how we will be moving forward with the further engineering
|

|
|
Current Progress & Later Plans

|
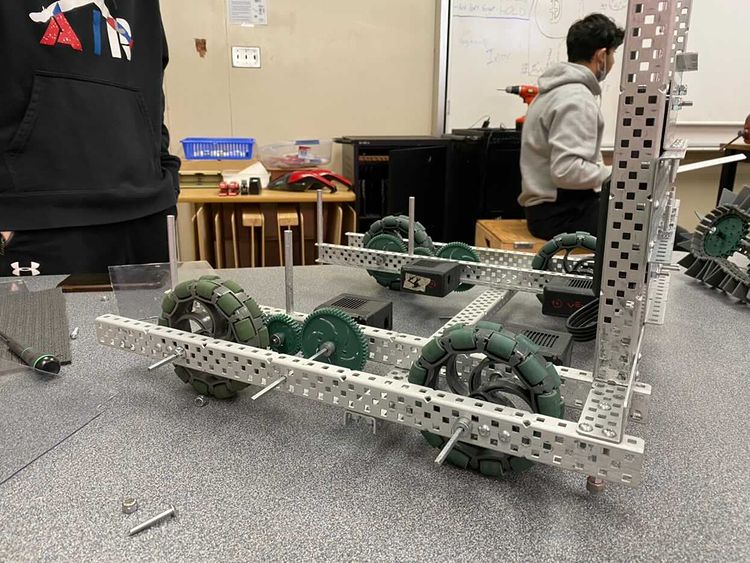
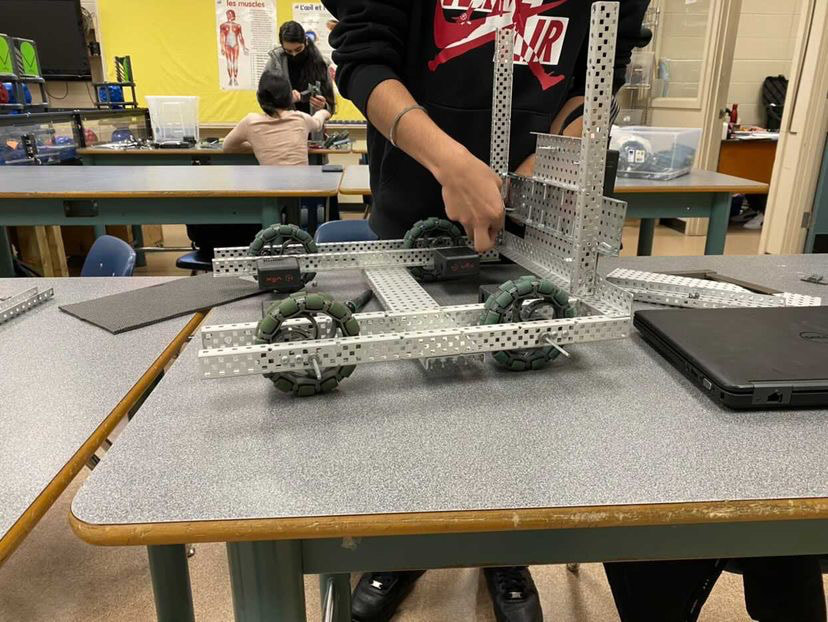
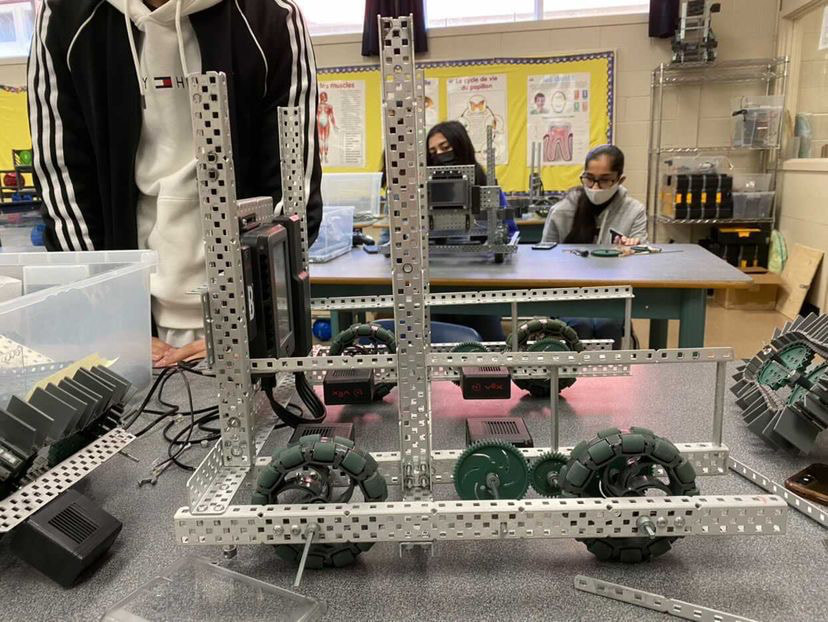
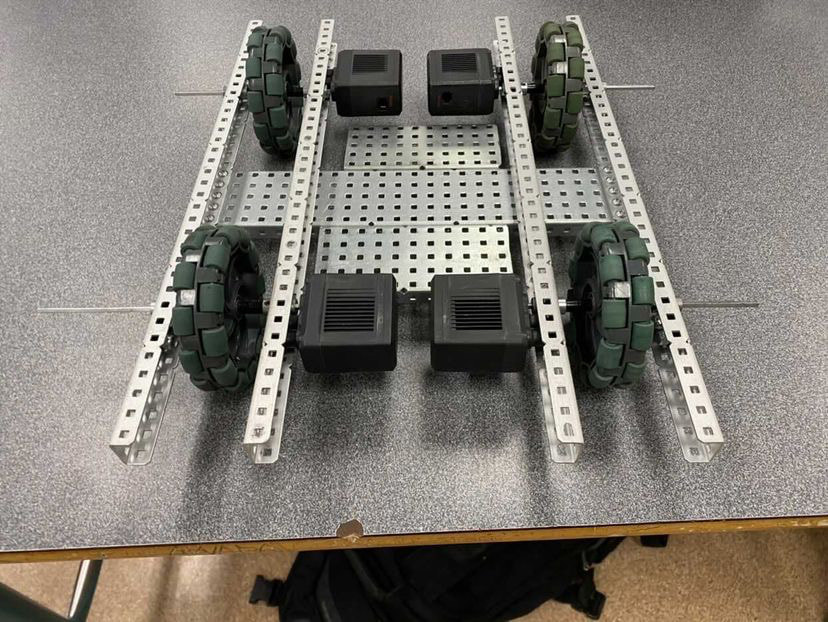
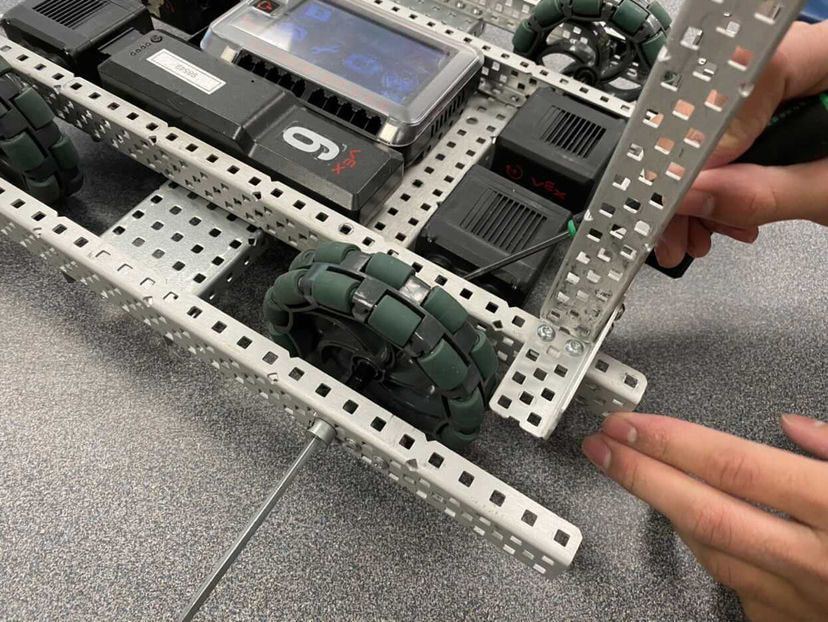
We are currently working on building the ramp for the balls to be scored. Till now we are done with our drivebase, The brain place, gear train and have successfully put in the intakes. We will be using a plexi-glass sheet to use as a ramp, on this ramp there will be traction cloth laid that would help the ball to stay on the path and not fall back down or get stuck. The intakes work properly and harmoniously with our idea. We will be using rollers right after the intake that would roll over the ball into the rim. We would have to add a couple c channels to make it more sturdier and supportive for the ramp and rollers to work. We have done the basic coding like the working of intakes and the wheelbase. Other than that things are going good right now.
|

|
Obstacles & Struggles

|
Our first problem was that the wheelbase was not wide enough for the ball to go through the we had make it wider and after a while we would out that it wasn't wide enough either so we had to max out on the width with 18 inches and then our brain placement proved wrong because it was making the bot outside the size limit and these all problems were fixed. Stuff started going smooth like butter yet again we faced a problem with that being that since we had made it a awd base the motors were coming in the way of the ball path then we had moved the front motors back with the incorporation of gear trains. Then we had the inakes and ever since that our trajectory of progress has being fast and positive since,We as a group do not think that facing difficulties while developing something is nothing but all negative but our thinking is that not to rush through anything and even if we mess up on anything, we should fix it right then and now. To learn from that mess up and make sure everything is the way we want it to be . We would rather fix our problems when we get them, rather than doing the time type of fix so that we don't create a problem later that could basically lead us all the way back. A few problems we had faced were related to the wheelbase/drivebase. We had to make the drive base wider since it didn't fit the balls or the intakes in and it wouldn't work out and we had fixed right there and then even thought that that had set us a bit behind but we used our ideaology on it.
|

|
____________________________________________________________________________________________________________________________________________________
