Tournament: Format/ Info
|
|
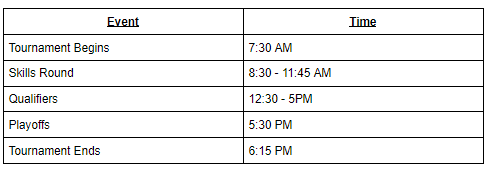
As a member of Burnsview Robotics, Our team got to take part in the BC Fall Qualifier hosted by the Pacific Youth Robotics Society at Collingwood Elementary School in West Vancouver. I was excited for this competition even more than the 2020 BCIT Last Chance. Since it was the first in-person competition after almost two years, I felt more prepared and competent than before since I had gained a lot of experience since then. In addition, we had the idea that our robot could do something and perform. 7:30 AM marked the start of the competition. This team was responsible for organizing and completing Inspections. The Skills round began at 8:30 AM. During the skills round, you can practice, test, and score points individually and these points contribute to awards. After 11:45 AM, Qualification began. During this period, the main matches are played and the playoff teams are determined. Each team plays six games during this period. Over 70 teams from all over British Columbia competed here, and the top 32 made the playoffs. Playoffs consist of Quarterfinals, semi-finals, and Finals. The day concludes with an awards ceremony.
|
Our Robot
|
My group members and I stayed after school for many hours to complete our robot before the competition. After creating a robot that is not only fully functional but can also score mobile goals, my group members and I rushed to complete the autonomous mode in fewer than a day. Still, after trial and error, we coded the robot so that it would drive to the center of the field, pick up a neutral goal, and be ready to score goals. The robot has a 4WD drive base accompanied by a conveyor tray that it uses to score rings into goals. The robots anterior has an opening into the conveyer, whereas its posterior is equipped with a tilter. Moreover, the robot has a tilter that picks up alliance goals and carries them. We have determined that our conveyor can score four rings every ten seconds after testing. If necessary, we can climb the ramp and make it level. In addition to offensive abilities, we have built a device on the bot's left side called a Hooker. It is a hook-shaped device that can attach itself to a goal and then drop it. It is a hook-shaped device that can attach itself to a goal and then drop it. It is a great defensive and de-scoring tool. Overall, our robot is ready, and we expect it to perform and do some good during this tournament.
|
|
Inspection
The Inspection went quite smoothly. We didn't have any problems because our robot complied with all the legal limits with regards to size and weight. However, one of the edges of the c-chanel was sharp, so we had to file it down. Having smoothed and filed a piece of our C-channel, the invigilator declared that all was well and we were ready to roll.
Skills Round
|
The Skills Rounds are made for the teams to test, practice and score points with their robots individually. We tried out the skills round 3 times. The skills round is very helpful as it lets you know where you stand and how efficient your robot is. In our case, matters were complicated. Even though our robot was functional, efficient, and scored high, our first skills run resulted in only 26 points. Due to a lack of practice with the robot and the conveyor belt, we had difficulty controlling it. After fixing the conveyor chain two more times and competing in skill runs, Harkeerat became more confident. Our team earned nearly 89 extra points before the qualification matches and finished in the top 30 in the skills round. The skills round ended with a lot of feedback on our robot and how it can be used to prove proficiency.
|
|
Qualifier Matches
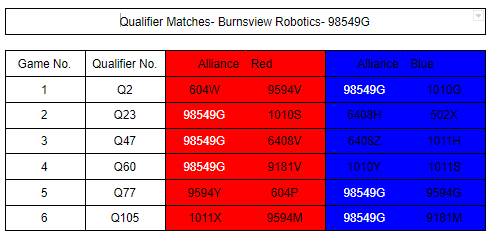
Our Fixture for Qualification Round
Game 1

|
|
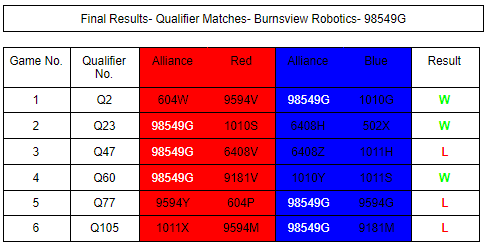
In our first game, we teamed up with 1010G. 1010G had a solid and efficient robot whose style complemented perfectly with ours. Due to our robot's ability to score rings and carry goals, their robot had a reserve-4 bar and a tilter which could place the goals onto the ramp and carry the goals as well. We met up and discussed a strategy before the game. The plan was to let 1010G get goals and bring them to our side, and our duty was to score rings into the goal and bring the alliance goals to our side. As the autonomous period began, we faced a problem. Despite our controllers being plugged in, the autonomous wasn't rolling. A similar problem occurred with 1010G, which led to The Red Alliance winning the autonomous period. During the Driver-Controlled period, things were different as we were able to score rings in goals and bring alliance goals to our side. Additionally, 101G did a great job by putting the neutral goals on the ramp and the ringed-alliance goals as well. In the end, we won 138-63. First Dub in the bag!!
|

Game 2

|
We played with the 1010S in the second game. Similar to the last game, the 1010S had a solid and efficient robot that complimented our style. Since our robot scored rings and carried goals, their robot had a reserve-4 bar and a tilter that could place the goals on the ramp and carry them as well. Before the game, we discussed a strategy, the plan was to let the 1010S get goals and bring them to our side, and our duty was to score rings into the goal and bring the alliance goals to our side. Our team won the autonomous, and then we won the game too, but it was close because the other team was proficient and competitive as well. We scored rings in the goals we brought back to our side, and 1010S scored by putting goals on the ramp. It was a close with scores of 116-110. Our ability to score rings in our goals cushioned us to win this game.
|
|

Game 3

|
|
Our first loss came in the third game, following a solid start. We were teamed up with 6408H. The 6408H had a solid robot as well, which had a vertical conveyor for scoring rings, a reverse-4-bar and a tilter to carry pickup goals. On the other hand, our opponents were also strong; one was similar to 6408H and the other had a double reserved-4-bar and was able to pick up the longer neutral goal. We started the game by winning the autonomous. However, as the game began tables turned, even though we would have won, our driver Harkeerat accidentally interfered with the ramp of the other alliance in the last 30 seconds, which cost us 80 points. We lost our first game, and it was heartbreaking as we could've won with ease but due to the penalty.
|

Game 4

|
After the horrors of the last game, we bounced back in our fourth game with the help of 9181W after winning autonomous mode and scoring over five rings while our partners used their 4-bar system to place goals on the platform. Team 918NV had one of the strongest robots in the tournament and was one of the top teams in the tournament. Although we won, I feel like we got carried in this game ad 9181V was by far the superior robot and we could only ring, but we still contributed to the victory. During this time, we had reached the top 10 on the leader |
|

Game 5

|
|
In terms of personal performance, Game 5 was the worse for us. This was really embarrassing as all the other robots were not that strong and we had underestimated the driving ability of the opponents. To begin with, we lost the autonomous mode and got decimated in the driver-controlled period. We made mistakes because of weak partners, overconfidence, and mistakes made by our team. We had a superior robot than our partners as they couldn’t score enough rings to win the game. Still, it was our job to sail through victory regardless of how that played out. Unfortunately, we lost this game by 40 points and dropped down to a do-or-die situation. |

Game 6

|
With Game 6, It was a do-or-die situation as If we lost would have lost then disqualified or if we win the playoffs bound. For the final round, my group members and I needed the win to qualify for the playoffs. 9181M was a solid robot as well which had a vertical conveyor for scoring rings, a reverse-4-bar and a tilter to carry pickup goals. After having a draw-in auto, we scored almost eight rings in the goal. We could have easily won this game but 9181M hoarded the goals for too long as well as that at the end they just drove out of the scoring zone. Yet, that was not enough for the win as our partners 9181M inadvertently moved the goals onto the opponent's side, costing us the game as well as the trip to the playoffs. Now I understand not to rely on your alliances because that's what cost us our trip to the playoffs.
|
|

Final Results
Playoffs/ Summary
|
Even though we finished 32nd and 3-3, we did not qualify for the playoffs. 98549X,Z,R made the playoffs to represent our schools/clubs' hard work. Now I realize how vital it is to plan strategies prior to the tournament and not to rely on your alliances because that's what cost us our trip to the playoffs. In the end, Seaquam's 9181 W and WVSS's 10012W won the tournament.
Overall, I had a blast and I would say that this was one of the most exciting tournaments I have ever attended. We were able to learn not only that we can perform well, but also that rushing things may not produce the best results. However, I made many new friends during the competition and was able to discover a new school and hang out with my friends. As well as going to Capilano Lake and Cleveland Dam, I got to learn a lot of new things during my trip. The best effort my team put into 98549G makes me proud. Despite our shortcomings, I am proud of my teammates and myself. Additionally, we discovered new designs, such as the 4-bar system, and how effective it can be. We are already preparing to do better in our next competition. Onto the next one. |

|
