Previuos Update

In the previous update, We talked about how we have built our drivebases and the steps to build a effiecnt drivebase. In this update, I will talk about our prototypes of the robot.
Robot Prototype-Robot 1
Idea
|
|
As we progress on to the next step, Our Idea is to build a tilter which will carry the goals and a conveyor through which we will score in the rings into the stem. This design is unique as it involves a slanted converter intake which would transport rings in it and drop them into the goals which will be lifted by the tilter. I made a 3D Model for this robot as well. We have started to build the tilter. Now let’s take a look at the progress made by us. |
Progress
|
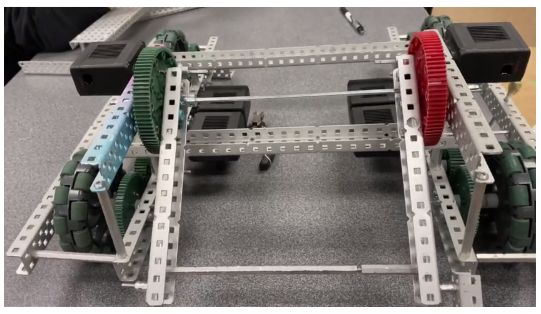
We are curently still working on this robot. Initially, we had decided that we would build an arm using two different motors and C-Channels. We would use a large gear and combine it with a smaller one in order for the robot to have lots of power when moving the arm upwards or downwards. We are currently behind the planned timeline but we will catch up as we caught some issue while building it. We have put gears as wells the foundation for the tilter on and now we will begin tests in a week. |

|
Struggles
|
Whenever the right side of our arm moved upward, the left side was significantly delayed and could not pick up any targets. Regardless, we tried many different ideas, including connecting the two C-Channels, but that always prevented the arm from moving upwards or downwards. After many days of trial and error, my group members and I decided on an effective strategy. Using a large shaft, we connected both large gears. This allowed the robot to have two separate motors for the arm containing smaller gears on a shaft and prevented unidentical movements from each side of the arm.
|
Robot Prototype-Robot 2
Idea
|
For Our Second robot, we decided to try a different arm, a lifter. Instead of using and implementing a traditional tilter, we used this video as an inspiration to build our second robot. This would b accompanied by a forebear on the other side which would help us elevate goals onto ramps and hold on to them longer. The gears allow full 360° movement of the bar. |
|
Progress
|
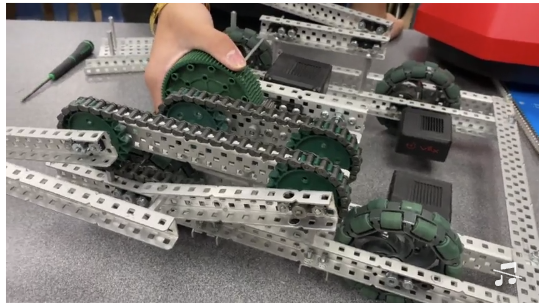
We are done building this specific part and the credit goes to Marlene, Harkeerat. As my group and I began constructing the second drive base for our secondary robot. We decided to reduce the size of the machine (16x17) in order to create a unique design. As a result, the robot will be highly mobile and have a unique design for which all members are in agreement. The arm design to pick up goals was effortless to make with the help of Marlene, as her ideas allowed the group to work in perfection. In order to connect the gears to the C-Channels, we used small bars. The arm is able to get under the goal because the smaller C-Channel is connected to a larger one. The gears allow full 360-degree rotation. Now, we will be moving to testing phase.
|
Struggles
|
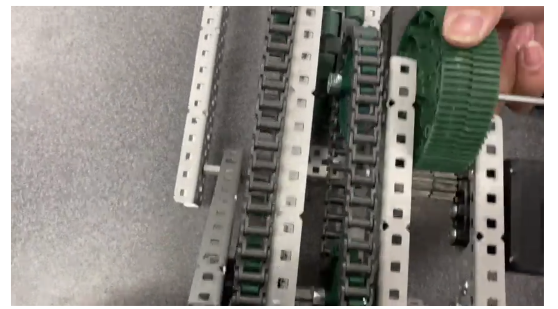
While testing, We found out some red flags.In our experiments, the gears would jam against each other when we moved the arm in a complete 360° motion, preventing the arm from moving. This was causing the gears to jam. Therefore, we decided to loosen the gears and chain; this led to more issues as the C-channel would get stuck against the chain. |
