Tournament Info/ Format
|
|
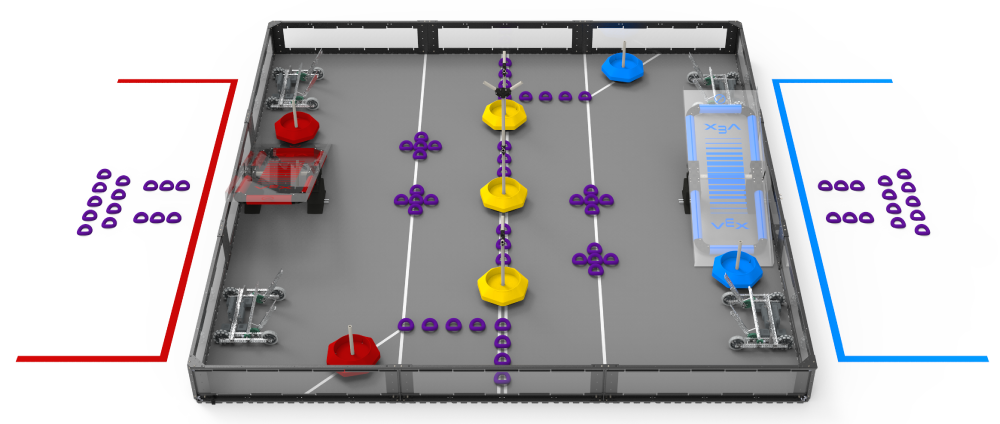
After the surge in COVID-19 cases, Our tournament at Seaquam was cancelled. But we still need some action before we ended the year. So, Mr. Ma decided to conduct an in-class competition consisting of all Sem 1 Grade 12, 11, 10, 9 teams. The format consisted of 10 Teams and it would be done in pairs, 2 vs 2. Each team plays 4 matches and the top 4 teams play each other to go to finals and then be crowned class champs.
|
|
Our Robot
|
Our Robot was pretty much the same as the last competion but with some modifications. The robot has a 4WD drive base accompanied by a conveyor tray that it uses to score rings into goals. The robots anterior has an opening into the conveyer, whereas its posterior is equipped with a tilter. Moreover, the robot has a tilter that picks up alliance goals and carries them. We have determined that our conveyor can score four rings every ten seconds after testing. If necessary, we can climb the ramp and make it level. Some of the modifications we made were adding rails and barriers on each side which will not allow the rings to get in. We also removed the hooker because it was a waste of motor and added extra weight. We also updated our autonomous and made it fully functional and scored as well. Although, we did not have forebar like other robots, we were still ready and scoring. |
|
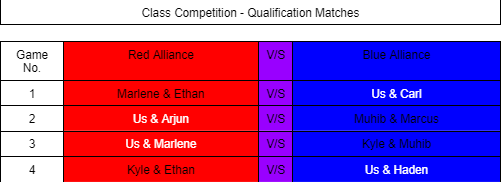
Qualifier Matches
Our Fixture
Game 1

|
|
For our first game we were paired with Carl. His robot had a forebar, tilter and a coveyr belt. His robot and driving syle coplemented our robot perfcetly. However, Carl did not have autonomous. Fortunately, We had a fully funtioning and scoring autonomous. In the game, We won the auton mode. There was some competion during the game but we ended up dominating them and won our first game. Our autonomous helped us immensely during the competition because our robot lacked a 4-bar. In the first game, our robot was the only team with auto, and even though the other alliance stole the neutral goal, we were able to win the match. First Win!! |
Game 2

|
In the second game, we were teamed up with Arjun. His robot had a forebar, tilter and a conveyor belt. His robot and driving syle coplemented our robot perfcetly. However, Arjun did not have autonomous. Fortunately, We had a fully funtioning and scoring autonomous. Still, the second game was much more difficult as our partners could only push the goals. Nevertheless, we won the auto portion of the match; however, our opponents were able to place their goals on top of the ramp, and even after knocking it down, they won the match. |
|
Game 3

|
|
Game 3, We were teamed up with Marlene. Both our robots had autonomous but our autonomous were functional but ours was able to score consistently. In the third game, we won autonomous again. But as the game progress, we were not able protect our possesed goals and lost some of our possesions. But our opponents were able to steal and stack three neutral goals on the ramp. With this game, we ended up taking 2 Loses in a row. |
Game 4

|
We paired up with Haden, His robot had a forebar, tilter and a conveyor belt. His robot and driving syle complemented our robot perfcetly. Haden did not have an autonomous but we did. We won the autonomous round and were leading the game. The driver-control period went pretty smooth as well and we got the goals and Haden elevated. We won the final game of the regular season-ending with a record of 2-2 and averaging the most points per game. We had the highest point scored average of 64.50 points a game. |
|
Results
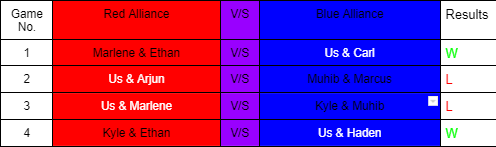
Playoffs
|
|
We won the final game of the regular season-ending with a record of 2-2 and averaging the most points per game. Still, in the playoffs, we struggled with our autonomous as the other group would reach the neutral goals first and neutralize our primary source of points. In the first game, they were able to score almost all goals with a few rings at base and in the final game of the year, we lost by a very close margin. We lost 2 of 3 playoff games. |

Year End Summary
|
This year was roller-coaster ride, learnt a lot of new things. From almost not finishing the robot to making a top robot which alost made playoffs but got robbed due to partner's mistake. Then, our tournament being cancelled and then being a top team in class competition. All those after-school hours and ordering food after-school, this was definetley one of the most fun courses of my life. I am very proud of my partners and myself after a great year of making new experiences. I enjoyed learning from my mistakes last year and becoming an important member of my team. I will never forget the memories I made this semester. |
|
