
VEX Games: Change Up 2020-21

|
So, This years VEX compoetion Game is The Change Up. VEX Robotics Competition Change Up is played on a 12’x12’ square field with 2 Alliances with one being red alliance and other one being blue. Composed of two teams each, compete in matches consisting of a fifteen second Autonomous Period and the full game after that is one minute and forty-five second which is the Driver Controlled Period. Balls are to be Scored in Goals. Each scored Ball is worth 1 point for the corresponding Alliance color. The highest scored Ball in a Goal will be owned by the corresponding Alliance color. More the goals and points scored and you would win the game.
|
|
Obstecles & Struggles
The mistake we had.
|
.We as a group do not think that facing difficulties while developing something is nothing but all negative but our thinking is that not to rush through anything and even if we mess up on
anything, we should fix it right then and now. To learn from that mess up and make sure everything is the way we want it to be . We would rather fix our problems when we get them, rather than doing the time type of fix so that we don't create a problem later that could basically lead us all the way back. A few problems we had faced were related to the wheelbase/drivebase. We had to make the drive base wider since it didn't fit the balls or the intakes in and it wouldn't work out and we had fixed right there and then even thought that that had set us a bit behind but we used our ideaology on it. |
Our Prototype: Idea

|

|
|
|
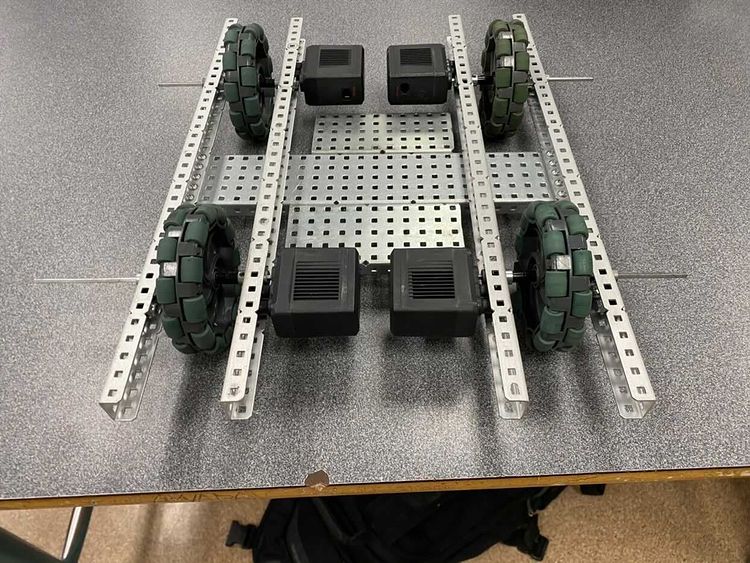
So our drivebase is an All wheel drive setup which means each wheel is powered by a motor that is 4 motors used to drive this robot. on the rear of the base we have the main control center where you can find the brain, battery and the radio. right beneath it are the anti tip off wirch are pole like objects screwed to the both ends of the rear of the bot which decrease the chances of tipping. We are going to be using a ramp which will lead the balls to the rollers which would turn with the help of gear ratios and motors to score points. Which ther the tower section would have 3 rollers, 2 in front and 1 in the back which would have a ramp connected to which would pass the balls from the intakes to the rollers.
|
The Evolution of Our Prototype-1
Going Forward
|
As we go on even more deeper and deeper with the development of this robot, We are looking to add in our intakes, roller tower and the traction ramp that will hold the ball in its place. We will also get started with the actual intake and rollerblading coding since we are already done with drivebase movement. Let's hope that not many mistakes are but if yes we will get to work and learn from it. I will be updating on this robot build in further posts. Our goal is to make a robot that is functionable and can compete with better top level bots.
|

|
